











QR-kód

Termékek
Lépjen kapcsolatba velünk

Telefon

Email

Cím
22. szám, Hongyuan út, Guangzhou, Guangdong tartomány, Kína

Javasolunk egy 3D -s látási útmutatáson alapuló megoldást az alumíniumötvözet -panelek olajkefe, szárítás, be- és kirakodási folyamatának automatizálási követelményeinek való megfelelésére. Ez a megoldás eléri a panelek nagy pontosságú felismerését és elhelyezkedését azáltal, hogy bevezeti a fejlett 3D-s látástechnológiát, ezáltal javítva a termelés hatékonyságát és a minőségi stabilitást.
A terv áttekintése
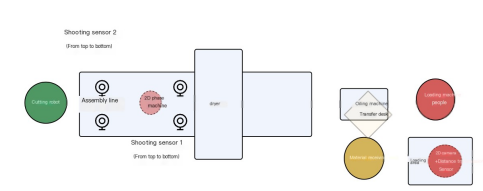
Ez a terv eléri az alumíniumötvözet -panelek pontos azonosítását és elhelyezkedését azáltal, hogy konfigurálja a 3D látási rendszereket a berakási és a kirakodási területeken. Az etetési terület szívó -táplálkozási módszert alkalmaz annak biztosítása érdekében, hogy a panelek zökkenőmentesen és pontosan belépjenek a gyártósorba. A kirakodási területet robotok automatizálják, hogy megragadják és elhelyezzék a táblákat. Ugyanakkor annak biztosítása érdekében, hogy az olajozási folyamat ne érintkezésbe kerüljön a termék elülső részével, az olajozó eszközt oldalsó vagy felső olajozási módszerként terveztük.
A terv végrehajtása
A rakodási terület megvalósítása
A rakodási területen telepítettünk egy 3D látási rendszert, amely nagy felbontású kamerát és egy képfeldolgozó egységet tartalmaz. Amikor az érzékelő felismeri a munkadarabot, a kamera azonnal képet készít, és továbbítja a képadatokat a képfeldolgozó egységre. A képfeldolgozó egység a képet algoritmusokon keresztül dolgozza fel, kinyitja a tábla kontúr- és helyzetinformációit, és kiszámítja a tábla Y1 értékét. Ezután az Y1 -érték alapján a szívóeszközt úgy szabályozzák, hogy pontosan felszívja a lemezt, és simán táplálja a gyártósorba.
Kirakodási terület megvalósítása
A kirakodási területen egy 3D látási rendszert és egy robotot is felszereltünk, nagy pontosságú megragadó és elhelyezési funkciókkal. Amikor az 1. érzékelő felismeri a munkadarabot, a kamera képet készít, és megadja az 1. termék Y1 értékét; Ezt követően, amikor a 2. érzékelő felismeri a munkadarabot, a robot pontosan megragadja az 1. terméket az Y1 érték alapján, és a kijelölt helyzetbe helyezi. Hasonlóképpen, amikor az érzékelő újra felismeri a munkadarabot, és megadja a 2. termék Y2 értékét, a robot ismét megragadó és elhelyezési műveleteket hajt végre. A folyamat során optimalizáltuk az algoritmusokat és a kalibrált kameraparaméteket annak biztosítása érdekében, hogy az elhelyezés pontossága megfelel a ± 2 mm -es követelménynek.

Megoldás:
A következő intézkedéseket hoztuk a ± 2 mm -es elhelyezési pontosság elérésének nehézségének kezelésére:
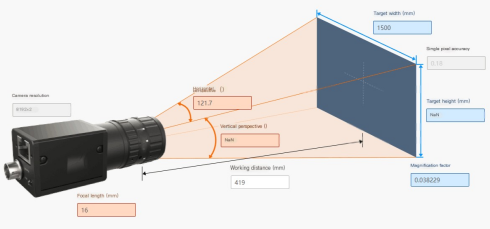
Javítsa a kamera felbontását és a látómező szélességét: Válasszon egy nagyobb felbontású kamerát a képadatok pontosságának növelése érdekében; Ugyanakkor állítsa be a kamera látómezőjét a gyártósor tényleges helyzetének megfelelően, hogy biztosítsa a teljes munkafolyamat lefedettségét.
Optimalizálja a képfeldolgozó algoritmusokat: Az alumíniumötvözet-panelek jellemzőinek és felületi textúráinak mélyreható kutatásainak elvégzésével optimalizálja a képfeldolgozó algoritmusokat a kontúrfelismerés és a pozíció kiszámításának pontosságának javítása érdekében.
A robotparaméterek pontos kalibrálása: Pontosan kalibrálja a robotot, beleértve a robotkar hosszát és ízületi szögeit, amelyek a nagy stabilitás és pontosság biztosítása érdekében a megragadás és az elhelyezés során.
Ez a megoldás az alumíniumötvözet -panelek olajkefe, szárítás, be- és kirakodási folyamatának hatékony automatizálását eredményezi a 3D látás -technológia bevezetésével. Az algoritmusok optimalizálásával és a berendezések paramétereinek pontos kalibrálásával sikeresen megoldottuk az adagoló elhelyezésének pontosságának problémáját, javítva a termelési hatékonyságot és a minőségi stabilitást.
22. szám, Hongyuan út, Guangzhou, Guangdong tartomány, Kína
