











QR-kód

Termékek
Lépjen kapcsolatba velünk

Telefon

Email

Cím
22. szám, Hongyuan út, Guangzhou, Guangdong tartomány, Kína

A hatékonyságot, a pontosságot és az automatizálást igénylő modern feldolgozóiparban a CNC megmunkálási technológia alkalmazása egyre szélesebb körben elterjedt. A CNC szerszámgépek betöltési és kirakodási folyamata azonban gyakran szűk keresztmetszetgé válik, amely korlátozza a termelési hatékonyságot. Ennek a korlátozásnak a leküzdése érdekében a Fuweii Intelligent elindított egy összetett robot CNC automatikus berakodási és kirakodási megoldást, átalakítva a gyártási folyamatot, és javítva a termelési hatékonyságot és a rugalmasságot.
Projekt áttekintése
A projekt célja a nyersanyagok automatikus betöltése és kirakodása a CNC megmunkálása során, valamint a szükséges ellenőrzési és tisztítási folyamatokat. A kompozit AGV (automatizált vezetett jármű) robotkar rendszer bevezetésével, a szkennelő kamerákkal és a látás kameráival kombinálva, pontos és hatékony anyagkezelés és folyamatkezelés érhető el.
Rendszerösszetétel
Kompozit AGV robotkar -rendszer: Tartalmaz olyan kulcsfontosságú elemeket, mint az AGV test, a robotkar, a szkennelő kamera, a pozicionáló látó kamera stb.
Ellenőrző rendszer: Felelős a feladatjelek fogadásáért a ② területi berendezés rendszeréből, az AGV robotkar rendszerének vezérlésével az olyan műveletek befejezéséhez, mint például az anyag megragadása, kezelése és elhelyezése.
Szkennelő rendszer: A QR -kód szkennelő kamerával történő beolvasásával az anyaginformációk beírhatók és nyomon követhetők.
Helymeghatározó rendszer: A helymeghatározó kamerák használata az AGV robotkar -rendszerek pontos helymeghatározásának és navigációjának eléréséhez.
Munkafolyamat
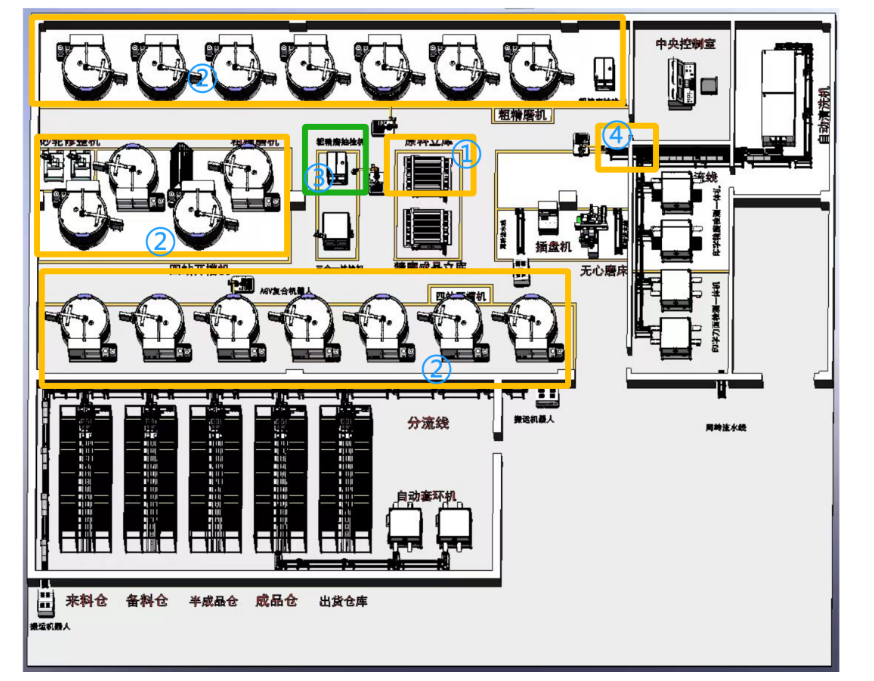
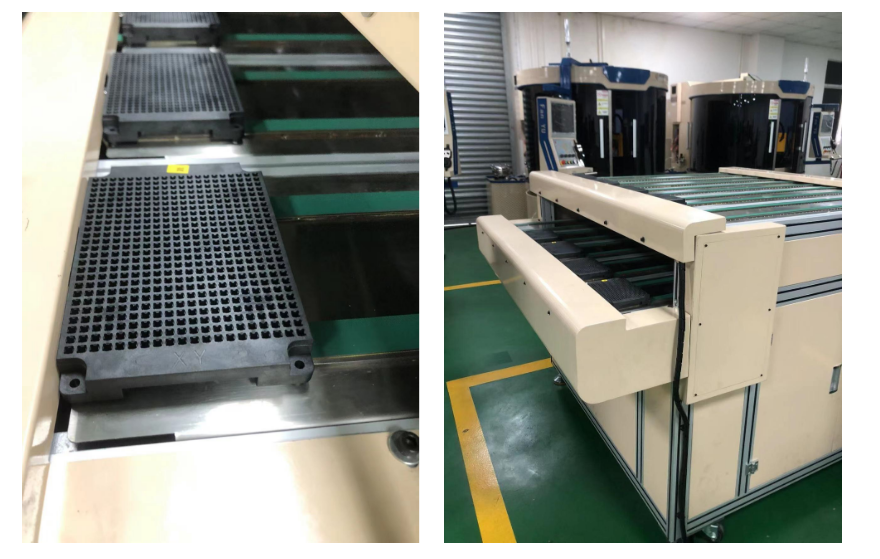
Alapanyag -megragadás: A kompozit AGV robotkar rendszer a nyersanyag -tárolás első rétegére kerül, hogy megragadja a feldolgozandó anyagokat a vezérlőrendszer utasításai szerint.
Feldolgozási eljárás: Töltse le a rögzített anyagokat a gépbe ② területen, helyezze őket a gép belső elhelyezési helyzetének megfelelően, és várja meg a feldolgozást.
Vizsgálati folyamat (opcionális): Ha a rendszer tesztelési kérelmet bocsát ki, küldje el a penészlemezt a gép tesztelési helyzetéből az ② területen a tesztelési berendezések elhelyezési területére a tesztelés ③ területén. Az ellenőrzés befejezése után küldje vissza a penészlemezt a gépre a ② területen.
Tisztítási folyamat: Helyezze a berendezés által feldolgozott anyagokat az ② területen a tisztítógép szállítószalagon a ④ területen, és az anyagtisztító munkát a szállítószalag automatikusan befejezi.
Műszaki megvalósítás
Kompozit AGV robotkar rendszer: Fejlett AGV technológia és robotkar technológia elfogadása a hatékony és pontos anyagkezelés elérése érdekében.
Szkennelő rendszer: Nagyteljesítményű szkennelő kamerák használata a pontos bemenet és az anyaginformációk nyomon követése érdekében.
Helymeghatározó rendszer: A fejlett vizuális pozicionálási technológia felhasználása az AGV robotkar -rendszerek pontos pozicionálásának és navigációjának eléréséhez.
Ellenőrző rendszer: Megbízható vezérlőrendszer elfogadása a teljes rendszer stabil működésének és hatékony együttműködésének biztosítása érdekében.
Rendszer előnyei
Magas fokú automatizálás: Az automatikus berakodás és a kirakodás, a nyersanyagok felismerése és tisztítása megvalósítása a CNC megmunkálási folyamatban, javítva a termelési hatékonyságot.
Nagy pontosság: A szkennelő kamerák használatával és a vizuális kamerák helymeghatározásával, a pontos bemenet és az anyaginformációk pontos elhelyezése.
Erős rugalmasság: A munkafolyamat rugalmasan beállítható a tényleges igények szerint, hogy megfeleljen a különböző termelési követelményeknek.
Erős nyomon követhetőség: Szkennelő rendszer használatával az anyaginformációk nyomon követésére és nyomon követésére a teljes folyamat során a termékminőség -kezelés szintje javítható.
22. szám, Hongyuan út, Guangzhou, Guangdong tartomány, Kína
