











QR-kód

Termékek
Lépjen kapcsolatba velünk

Telefon

Email

Cím
22. szám, Hongyuan út, Guangzhou, Guangdong tartomány, Kína

Mivel a feldolgozóipar felgyorsul a nagyobb pontosság és a hatékonyság felé, a termelési folyamatban az automatizálás és az intelligencia szintjére magasabb követelményeket tettek. Komplex és nagyon pontos munkadarabokkal, például inerciális gyűrűkkel szembesülve, a hagyományos betöltési módszerek nem voltak megfelelőek. Ebben a pillanatban a 3D Vision Technology növekedése forradalmi megoldásokat hozott erre a problémára. Ez nemcsak jelentősen javítja a táplálás pontosságát, hanem jelentősen javítja a gyártósor rugalmasságát és hatékonyságát.
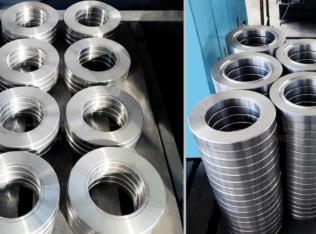
A 3D látástechnika alapelve az objektumok háromdimenziós térbeli információinak feldolgozása és elemzése a számítógépeken keresztül, valamint olyan műveletek elérése, mint az objektumfelismerés, az észlelés, a nyomon követés és a mérés. A tehetetlenségi gyűrűk pontos táplálkozásának alkalmazásában a 3D Vision Technology rögzíti a tehetetlenségi gyűrű háromdimenziós térbeli információkat, a robot pontos megragadó helyzetét és testtartását biztosítva, ezáltal elérve a tehetetlenségi gyűrű pontos táplálását.

A képalkotó algoritmusok szempontjából a 3D Vision Technology fejlett algoritmusokat fogad el, hogy megbirkózzon olyan összetett helyzetekkel, mint például a felületi reflexió és az inerciális gyűrűk olajfilm -lefedettsége. Az algoritmusok optimalizálásával a rendszer képes tiszta és pontos pontfelhő -adatokat generálni, szilárd alapot biztosítva a későbbi felismeréshez és rögzítéshez.
A kamera kiválasztása szempontjából a 3D látásrendszereknek nagy felbontású, nagy látóteret és nagy mélységélességű kamerákat kell választaniuk. Az ilyen típusú kamera rögzítheti a tehetetlenségi gyűrű teljes alak- és méretinformációját, biztosítva, hogy a robot pontosan megtalálja a célpontot a megragadási folyamat során. Ugyanakkor a nagy mélységélesség jellemzője lehetővé teszi a kamera számára, hogy a képalkotó hatásokat különböző távolságokon fenntartsa, tovább javítva az etetés pontosságát.

A képalkotó algoritmusok és a kamera kiválasztása mellett a 3D Vision technológiát szorosan integrálni kell a robotvezérlő rendszerekbe. A tehetetlenségi gyűrű valós idejű háromdimenziós térbeli információinak továbbításával a robotvezérlő rendszerhez a robot pontosan meg tudja találni a tehetetlenségi gyűrű helyzetét és megragadja a megragadást. Ez a valós idejű információcsere lehetővé teszi a robotok számára, hogy gyorsan módosítsák megragadó stratégiáikat, amikor különböző specifikációkkal rendelkező tehetetlenségi gyűrűkkel szembesülnek, és rugalmas termelést érnek el.
A 3D Vision Technology fontos szerepet játszott a tehetetlenségi gyűrűk pontos táplálkozási folyamatában. A képalkotó algoritmusok optimalizálásával, a megfelelő kamerák kiválasztásával és a robotvezérlő rendszerekkel való szoros együttműködés révén ez a technológia hatékony és pontos megragadást ér el a tehetetlenségi gyűrűkkel, javítja a termelési hatékonyságot és csökkenti a termelési költségeket.
22. szám, Hongyuan út, Guangzhou, Guangdong tartomány, Kína
