











QR-kód

Termékek
Lépjen kapcsolatba velünk

Telefon

Email

Cím
22. szám, Hongyuan út, Guangzhou, Guangdong tartomány, Kína

1 、 A projekt áttekintése
Ennek a tervnek a célja a robotoktatási gyakorlati platform rendszer testreszabása, hogy megfeleljen az egyetemi laboratóriumi oktatási igényeknek a gépi látás és az erővezérlés területén. A rendszert az AUBO-I5 együttműködő robot, a Hikvision ipari kamera, a 3D kamera és a Six Axis Force Sensor körül fejlesztik ki, hogy olyan funkciókat érjenek el, mint a robotvezérlés, a vizuális ellenőrzés és az erővezérlő szerelvény, és nyílt forrású számítógépes szoftvert biztosítanak a későbbi funkcionális bővítéshez.

2 、 Rendszer hardver összetétele
Robot: Az AUBO-I5 együttműködési robot elfogadása nagy pontosságú és nagy biztonsággal rendelkezik, és alkalmas a forgatókönyvek tanításiához.
Kamera: beleértve a Hikvision ipari kamerát és a 3D -s kamerát, amelyet a munkadarabok képinformációinak megszerzéséhez használnak, támogatva a hagyományos képfeldolgozást és a mély tanulási képfelismerést.
Hat dimenziós erőérzékelő: Kunwei (KWR75) vagy más márkák vannak kiválasztva az erő interakciós információk valós idejű megfigyelésére a robot vége és a munkadarab között.
3 、 Felső számítógépes szoftvertervezés
Alapvető funkciók:
Robotvezérlés: olyan funkciók megvalósítása, mint a kapcsolat, a leválasztás, a robotok közös vagy testtartási vezérlése.
Kameravezérlés: Végezzen olyan funkciókat, mint a kamera kapcsolat, a leválasztás és a képszerzés.
Állapot kijelző: A robot ízületi és póz állapotának valós idejű megjelenítése, a hat tengely erőérzékelő állapot paraméterei, valamint a kamera által rögzített képek.
Exkluzív funkciók:
A tengely lyuk szerelvénye: A felső számítógép működtetésével, a vizuális ellenőrzéssel és az erővezérlő technológiával kombinálva a tengely lyuk automatikus szerelvényfunkcióját érik el.
Interfésztervezés: A felső számítógép felületének tömörnek, tisztanak és könnyen kezelhetőnek kell lennie. Az interfésznek tartalmaznia kell az alapvető funkciógombokat és az állapotjelző területet, valamint hozzáférést biztosít a tengely lyuk szerelvény funkciójához.
4 、 Funkció megvalósítása
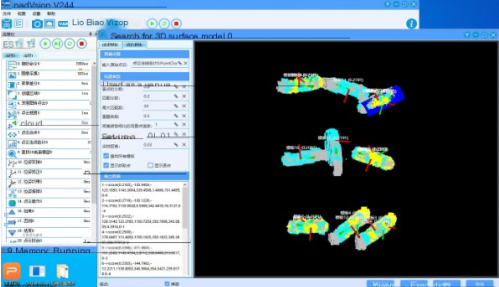
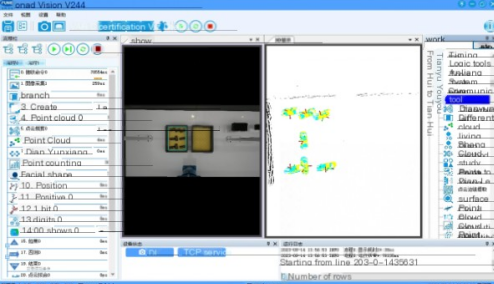
Gépi látás:
Hagyományos képérzékelés: A sablon illesztése, a kör illesztése, az él illesztése és az egyéb módszerek a munkadarabok felkutatására és felismerésére, a vonalkódok felismerésének, a QR -kódok, a karakterszámok, valamint a szürkeárnyalatos terület és a lemez mennyiségének kiszámításához.
Mély tanulási képérzékelés: A munkadarabok automatikus felismerése és lokalizációja mély tanulási algoritmusok révén. Noha a mély tanulásnak még mindig szükség van a képek kézi kommentálására, arra törekszünk, hogy javítsuk az edzés hatékonyságát és az elismerési pontosságot, fokozatosan csökkentve a kommentár munkaterhelését.
Teljesítményvezérlő szerelvény:
A hat dimenziós erőérzékelőből származó adatok kombinálása az erő kölcsönhatás -ellenőrzését érje el a robot vége effektor és a munkadarab között, valamint a tengely lyuk teljes pontos összeszerelését.
5 、 Projektkockázatok és válaszadási intézkedések
A hat tengely erőérzékelővel való együttműködés kockázata: A hat tengely erőérzékelővel való együttműködés hiánya miatt bizonyos technikai nehézségek és bizonytalanságok lehetnek. Rendezünk egy professzionális műszaki csapatot a probléma megoldására, valamint az érzékelők zökkenőmentes integrációjának és stabil működésének biztosításához.
A mély tanulási kép észlelésének kockázata: A mély tanulási képérzékelés bizonyos szintű felismerési pontosságot és hatékonyságot igényel, miközben teljesíti az egy kattintási képzés követelményét. Folytatjuk a mély tanulási algoritmusok optimalizálását az elismerési pontosság és a hatékonyság javítása érdekében, miközben feltárjuk egy kattintási képzés megvalósításának lehetőségeit.
6 、 A bővítés utáni és a jelenetváltás után
A felső számítógépes szoftver elfogadja a nyílt forráskódú kialakítást, amely megkönnyíti a funkcionális bővítést és a jelenetváltást, ha a későbbi oktatás szükséges. Például a tengely lyukak összeszerelő jelenete olyan feladatokra váltható, mint például a finom fogaskerekek megsemmisítése vagy más munkadarabok felismerése és megragadása. A nyílt forrású programok módosításával és hibakeresésével könnyű elérni a robot működési és vizuális észlelési funkcióit különböző forgatókönyvekben.
Ez a terv integrálja a hardver erőforrásokat, például a robotokat, a kamerákat és a Six Axis Force Sensor-t, a nyílt forrású felső számítógépes szoftvertervezéssel kombinálva, hogy a robotoktatási gyakorlati platformon keresztül gazdag és könnyen bővíthető oktatási környezetet biztosítson. A gyakorlati platformok felhasználásával a hallgatók mélyebben megérthetik a gépi látás és az erővezérlő technológia alapelveit és alkalmazásait, és javíthatják gyakorlati és innovatív képességeiket.
22. szám, Hongyuan út, Guangzhou, Guangdong tartomány, Kína
