










QR-kód

Termékek
Lépjen kapcsolatba velünk

Telefon

Email

Cím
22. szám, Hongyuan út, Guangzhou, Guangdong tartomány, Kína

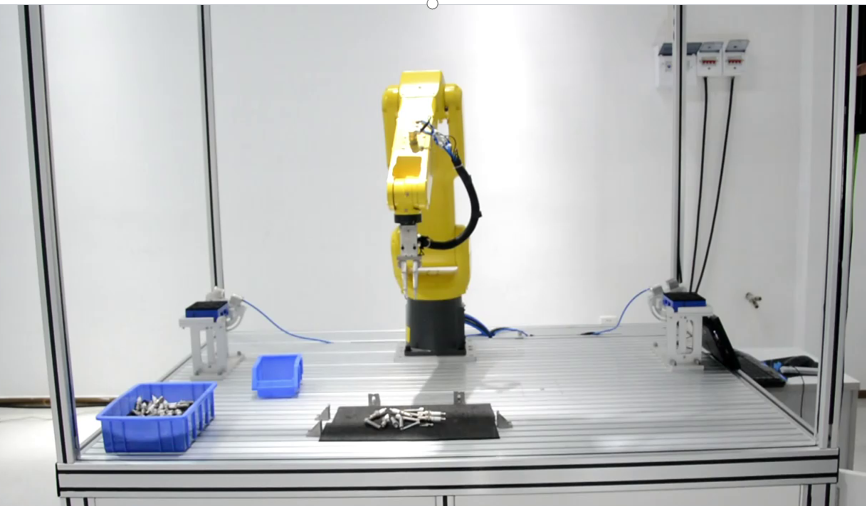
A gyártási automatizálás folyamatos fejlesztésével egy nagy autóipari alkatrészvállalkozás javasolta a kompozit robotok használatának szükségességét a csavarok szekciójának befejezéséhez a termelési hatékonyság javítása és a munkaerőköltségek csökkentése érdekében. A Fuwei Intelligent kompozit robotokat használ, a 3D ipari kamerákkal és a nagy teljesítményű vezérlőkkel kombinálva, az automatikus csavar megragadásához, ezáltal javítva a gyártósor általános működési hatékonyságát.
Projekt nehézségek
1. nagy pontosságú követelmény: A csavarok olyan kis alkatrészek, amelyek megkövetelik a robotok pontos azonosítását és stabil megértését, elkerülve a termékkárosodást vagy a gyártósor leállási idejét.
2.
3. Az összetevők pontosságának biztosítása közben optimalizálni kell a robot működési folyamatot és javítani kell az általános működési hatékonyságot.

Megoldás
A 3D ipari kamerák és a nagyteljesítményű vezérlők felhasználásával a robotok pontosan megtalálhatják a csavarok alkatrészeit, és valós időben beállíthatják a megragadó stratégiákat a vizuális felismerés révén, biztosítva a stabilitást és a pontosságot.
A Fuwei intelligens integrált vezérlő műhelyjeleket gyűjt, hogy zökkenőmentes integráció legyen a robotok és a gyártási vonalak között. Több tengelyes egyidejű vezérlés, a pályának rugalmas beállítása az anyagtartók és a megfogási pontok változásai szerint, alkalmazkodva a dinamikus környezetekhez.
Optimalizálja a házi feladatot, csökkentse a várakozási időt és javítsa a megragadási hatékonyságot. Állítsa be az ésszerű házi feladatot, és állítsa be a megragadás és az összeszerelés mennyiségét a kereslet szerint, hogy megfeleljen a gyártósor tényleges igényeinek.
Műveleti folyamat:
Miután megkapta az anyag megragadási kérelmét, a kompozit robot elkezdi költözni a kijelölt termékhelyzetbe. Ezután a robot vizuális pozícionálást végez a termék pontos felismerése és megragadása érdekében. A pozicionálási folyamat során, ha a rendszer észleli, hogy a termékek száma kevesebb, mint a beállított érték, akkor riasztást vált ki, és megpróbálja áthelyezni. Ha a helymeghatározás sikeres, a robot továbbra is megragadó műveleteket folytat; Ha a helymeghatározás meghibásodik, akkor a következő termék helyére költözik, és megpróbálja újra. A sikeres megragadás után a robot a terméket a kirakodási területre mozgatja a kirakodási művelet befejezéséhez. A teljes folyamat során a vizuális elhelyezés és a megragadás kulcsfontosságú lépések, biztosítva, hogy a robot hatékonyan és pontosan teljesítse a be- és kirakodási feladatokat.
Műszaki előnyök:
Alkalmazkodhat a környezeti megvilágítás drasztikus változásaihoz, és helyettesítheti a kézi munkát;
Intelligens robotkar akadályok elkerülése és pálya -tervezési algoritmus, amely a tárgyak észlelésének és lokalizációjának mély tanulásán alapul;
Képes alkalmazkodni azokhoz a forgatókönyvekhez, ahol több munkadarabot készítenek egyszerre.
Alapvető értékek:
Csökkentse a költségeket és növelje a hatékonyságot, javítsa a stabilitást, gyorsan működjön a termelésbe, és gyorsan alkalmazkodjon az új termékekhez.
Ez a terv jelentősen javítja a gyártósor működési hatékonyságát. Eközben a pontos pozicionálási és megragadó technológia révén csökkenthető a termékkárosodás és a gyártósor leállásának kockázata, javítva a termékminőséget és a termelés stabilitását. Ezenkívül a dinamikus környezetekhez való alkalmazkodóképesség és a hatékony tempóvezérlés tovább javítja a gyártósor rugalmasságát és válaszsebességét, megfelelve a GAC Toyota folyamatosan változó termelési igényeinek.
22. szám, Hongyuan út, Guangzhou, Guangdong tartomány, Kína
