











QR-kód

Termékek
Lépjen kapcsolatba velünk

Telefon

Email

Cím
22. szám, Hongyuan út, Guangzhou, Guangdong tartomány, Kína

Az intelligens gyártási technológia folyamatos fejlesztésével az automatizált gyártósorok alkalmazása a mágneses acél gyártás területén egyre elterjedtebb. A hagyományos kézi betöltési és kirakodási módszerek azonban olyan problémákkal küzdenek, mint az alacsony hatékonyság, az instabil minőség és a jelentős biztonsági veszélyek, amelyek már nem képesek kielégíteni a modern termelés igényeit. Ezekre a kérdésekre válaszul javasoljuk a Fuwei Intelligens kompozit robotok mágneses acél betöltésére és kirakodására történő felhasználására, a termelési hatékonyság javítására, a munkaerőköltségek csökkentésére, a működési biztonság biztosítására, valamint a mágneses acélgyártásban történő automatizálás és intelligencia elérésére.
Ipari fájdalom pontok:
1. A kézi működéstől való nagy függőség alacsony termelési hatékonysághoz és instabil minőséghez vezet;
2. A működési folyamat során biztonsági veszélyek vannak, például balesetek, például kézi szorítás és ütés;
3. A rossz munkakörnyezet potenciális veszélyt jelent az operátorok egészségére;
4.

Az ügyfelek igényeinek és megoldásainak áttekintése
Ügyféligény: Az ügyfél reméli, hogy a mágneses acél automatikus betöltését és kirakodását a Fuwei intelligens kompozit roboton keresztül eléri, javítva a termelési hatékonyságot és a minőségi stabilitást. A konkrét követelmények magukban foglalják két típusú termék be- és kirakodásának kitöltését, körülbelül 80 másodperces ciklusidővel, hogy befejezzék két termék rakományának betöltését, és nagy pontosságú követelményekkel rendelkeznek.
Megoldás áttekintése
A következő felújítási tervet javasoljuk ügyfeleink igényeinek kielégítésére:
1. Cserélje ki a motort és a szervo vezérlőt a robot teljesítményének és stabilitásának javítása érdekében;
2. Radar navigációval, könnyű csíkokkal és hangszórókkal felszerelve a robot autonóm navigációjának, láthatóságának és interaktivitásának fokozására;
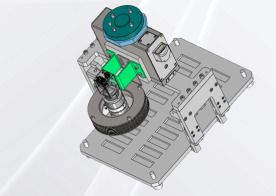
3. Tervezze meg azokat a testreszabott megfogókat, amelyek integrálják a kamerákat és az érzékelőket a mágneses acél pontos azonosítása és megragadása érdekében;
4. Optimalizálja a berakodási és kirakodási területek elrendezését és berendezések konfigurációját annak biztosítása érdekében, hogy a robotok pontosan és hatékonyan teljesítsék munkájukat.
4 、 A felújítási terv részletes végrehajtása
Összetett robot -átalakítás

Válassza ki a nagy teljesítményű motorokat és a szervo vezérlőket a robotmozgás pontosságának és stabilitásának biztosítása érdekében;
Radar navigációval felszerelve a robotok autonóm pozicionálásának és útvonaltervének eléréséhez;
Telepítse a LED -es fénycsíkokat és a riasztási hangszórókat a robot láthatóságának és interaktivitásának javítása érdekében;
Tervezzen testreszabott őrlőket, amelyek integrálják a kamerákat és az érzékelőket, hogy a mágneses acél pontos azonosítását és megfogását elérjék.
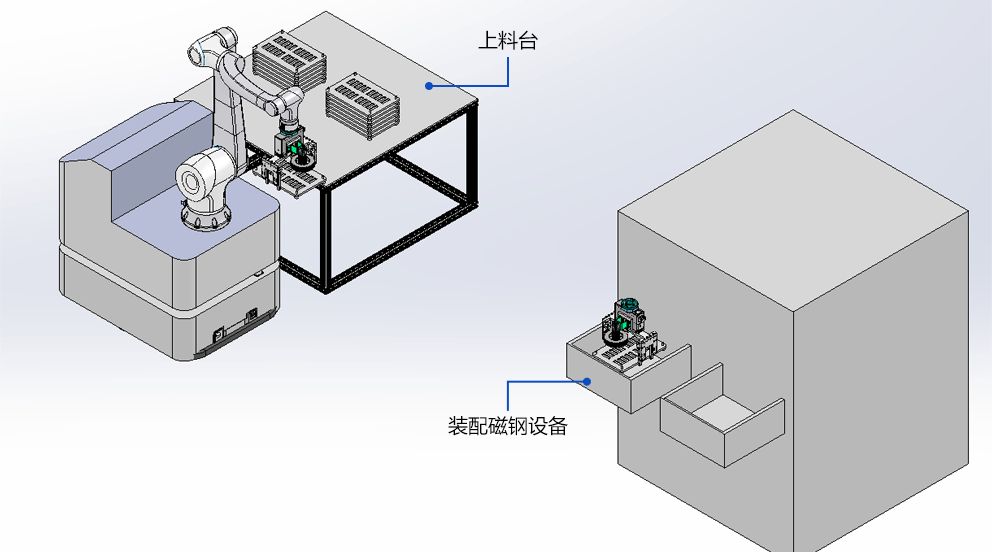
A rakodási terület optimalizálása
Tervezési helymeghatározó útmutató, amely a mágneses acélt a kijelölt helyzetekbe irányítja;
Állítsa be az asztali pozicionáló markereket, hogy megkönnyítse a robot felismerését és a megragadó pontok elhelyezkedését.
A kirakodási terület felújítása
Állítsa be az eszköz pozicionálási jelét, hogy a robot pontosan elhelyezze a mágneses acélt;
Szerelje be az elektromos kezelőpanel ajtaját és az elektromos vezérlő csúszó résidőket, hogy megvédje a kezelőit a sérülésektől és elérje az automatizált berendezések kiszámítását.
Végrehajtási logika és folyamat optimalizálása
A teljes megoldás végrehajtási logikája az automatizált gyártósorok folyamatának megtervezésén alapul, biztosítva a munkafolyamat folytonosságát és hatékonyságát. A teljes folyamatot egy betöltési kérelem váltja ki, és a robot anyag -visszakeresési műveleteket hajt végre annak alapján, hogy a betöltési terület készen áll -e. Az anyagok szedése és elhelyezése során a pontos felismerést és az erőszabályozást kamerákkal és érzékelőkkel érik el, amelyek integrálódnak a megfogásba. Miután a mágneset sikeresen elhelyezték a berendezésre, a robot megerősíti a betöltés befejezését, és a következő ciklusra halad.
A FUWEI intelligens kompozit robot használatával a mágneses acél betöltésére és kirakodására hatékonyan megoldhatjuk a hagyományos kézi betöltési és kirakodási módszerek problémáit, javíthatjuk a termelési hatékonyságot, csökkenthetjük a munkaerőköltségeket és biztosíthatjuk az operatív biztonságot. Ugyanakkor ez a megoldás nagy méretezhetőséggel és rugalmassággal is rendelkezik, amely képes alkalmazkodni a különféle mérlegek és termelési igények mágneses acélgyártó vállalkozásaihoz.
22. szám, Hongyuan út, Guangzhou, Guangdong tartomány, Kína
