










QR-kód

Termékek
Lépjen kapcsolatba velünk

Telefon

Email

Cím
22. szám, Hongyuan út, Guangzhou, Guangdong tartomány, Kína

Projekt áttekintése
A projekt célja egy hatékony és stabil billenő teherautó automatikus töltési rendszerének megtervezése, hogy megfeleljen az ügyfelek töltési igényeinek a beltéri termelési körülmények között a Shanxi régióban. A rendszernek el kell érnie a pilóta nélküli működést és a mérnöki járművek irányítását, csak az A és B pontok kezelési és automatikus töltési funkcióinak teljesítésével, hogy megfeleljen a gyártósor folyamatos működési követelményeinek.
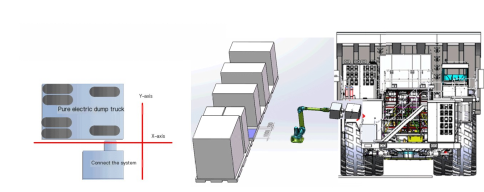
rendszerösszetétel
Vizuális pozicionáló rendszer: A nagy pontosságú kamerák és a vizuális algoritmusok felhasználása a töltőport pontos elhelyezkedése érdekében a billenőkocsikon. A vizuális rendszernek képesnek kell lennie arra, hogy ellenálljon a pornak és a közvetlen napfénynek, biztosítva a stabil működést különféle beltéri környezetekben.
Robotok és pisztolyt nyomó mechanizmusok: Az ipari robotok, amelyek legalább 3M kar -tartományt választanak, speciálisan kialakított pisztolytő mechanizmusokkal vannak felszerelve. A pisztolyt nyomó mechanizmusnak elegendő tolóerővel és pontossággal kell rendelkeznie annak biztosítása érdekében, hogy a töltőpisztoly pontosan és gyorsan beilleszthető legyen a töltőportba.
Töltő rendszer: Nagy teljesítményű 3 megawattos töltőberendezéssel felszerelt, biztosítva, hogy a billenő teherautó rövid idő alatt teljes mértékben tölthető legyen és javítsa a termelési hatékonyságot.
Vezérlőrendszer: Egy integrált vezérlőrendszeren keresztül érhető el a vizuális pozicionálás, a robotmozgás és a töltési folyamat pontos vezérlése. A vezérlőrendszernek nagy automatizálási és intelligenciajellemzőkkel kell rendelkeznie, és képesnek kell lennie a pilóta nélküli automatikus töltés elérésére.
Munkafolyamat
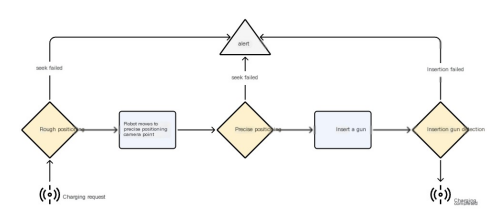
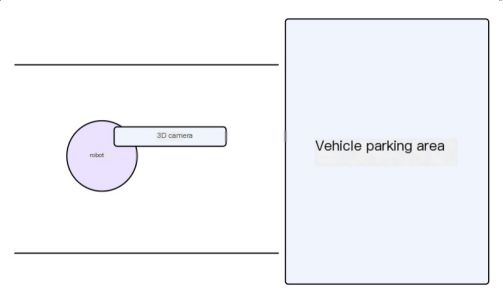
Saját dömping teherautó pozicionálása: Azonosítsa és keresse meg a billenő teherautó töltőport helyzetét egy vizuális pozicionáló rendszeren keresztül.
Robotmozgás: A vezérlőrendszer arra irányítja a robotot, hogy a dömping teherautó töltőportja közelében mozogjon a vizuális pozicionálási eredmények alapján.
A fegyver behelyezésének tolja: A robot egy tolópisztoly mechanizmussal van felszerelve, amely pontosan és gyorsan beilleszti a töltőpisztolyt a billenő teherautó töltőportjába.
Töltési folyamat: A töltési rendszer elkezdi tölteni a billenő teherautót, amíg el nem éri az előre beállított teljesítményszintet vagy az időt.
Robot evakuálása: A töltés befejezése után a robot evakuálja a töltőportot, és megvárja a következő billenő teherautó érkezését.
kulcstechnika
Vizuális pozicionálási technológia: Az olyan algoritmusok használatával, mint a mély tanulás, javítható a vizuális pozicionáló rendszerek pontossága és stabilitása.
Robotvezérlő technológia: A robot mozgásának optimalizálása és a sebesség javítása érdekében.
A pisztolyt nyomó mechanizmus megtervezése: Gondoskodjon arról, hogy a fegyvernyomás -mechanizmus elegendő tolóerővel és pontossággal rendelkezik, miközben figyelembe véve annak szerkezeti tömörségét és megbízhatóságát.
Kockázati reagálás
Beltéri környezetvédelem: Gondoskodjon a tiszta és száraz beltéri környezetről, csökkentse a por és a közvetlen napfény hatását a vizuális pozicionáló rendszerre.
Hardverkarbantartás: Rendszeresen karbantartja és karbantartja a hardvereket, például a robotokat és a vizuális pozicionáló rendszereket a normál működésének biztosítása érdekében.
Szakmai értékelés: Hívja meg a szakembereket, hogy értékeljék és optimalizálják a pisztolyt nyomó mechanizmust, a töltési rendszert stb., A megoldás biztonságának és megvalósíthatóságának biztosítása érdekében.
22. szám, Hongyuan út, Guangzhou, Guangdong tartomány, Kína
